modname=ckeditor
īss ievads:
1.mērķis
1.DC bldchall sensors kvadrātveida viļņu ātrumu、Elektriskā strāva、Dubultā slēgts loopPIDcontrol algoritms
2.Kvadrātveida viļņu ātrums DC brushless un sensorless、Elektriskā strāva、Dubultā slēgts loopPIDcontrol algoritms
3.Pastāvīgo magnētu sinhronais motorABZquadrature encoder FOC、 SVPWM、ātrums、Elektriskā strāva、Dubultā slēgts loopPIDcontrol algoritms
4.Pastāvīgo magnētu sinhronais Zālē sensorFOC、SVPWM、ātrums、Elektriskā strāva、Dubultā slēgts loopPIDcontrol algoritms
5.Pastāvīgo magnētu sinhronais sensorlessFOC、 SVPWM、ātrums、Elektriskā strāva、Dubultā slēgts loopPIDcontrol algoritms
6.Asinhrono communicationVFcontrol algoritms
STM32Motor kontroles plates uz DC brushless motors,Pastāvīgo magnētu sinhronais motors,Trīs fāzu MAIŅSTRĀVAS asinhrono motoru,Galvenokārt mācību motora kontroles,Īstenot un pārbaudīt transportlīdzekļu kontroles algoritms,Lietotāji, kuri izstrādāt mehānisko produktu。
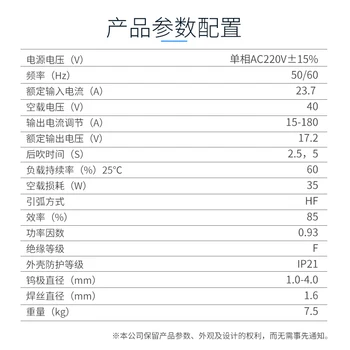
2.Attīstības padomes parametri
STM32Motor kontroles attīstības padome
1)Vadības panelis barošanas spriegums:24 V (Maximum60V)
2)vadības padomei nav savienots ar normālu darba strāva motora:60mA
3)Maksimālā kravnesība:120W(Sprieguma pieaugums,Jaudas pieaugums,24*5=120,Īstermiņa darbības laiku)
4)Maksimālā fāze current25A,Nominālo fāzes current10A
5)Autobusu pašreizējo paraugu ņemšanas,Posms pašreizējo paraugu ņemšanas,Pārstrāvas noteikšanu un aizsardzības;
3.Motoru parametri
24PM35W0304: Trīs posmu pastāvīgo magnētu motors : Trīs posmu pastāvīgo magnētu motors,Aprīkots ar trīs-fāžu Zālē pozīcijas sensors,Taisnleņķa kodētāju, kas savienots ar sakabes。Šis motors ir pielāgota,Trīs posmu pastāvīgo magnētu motors ar sinusoīdu atpakaļ EMF; Vektoru givingFOCControl isPMSMcontrol; Pārslēgšanu sešu solis pulsePWMNamelyBLDCcontrol;Asinhrono communicationVFThe kontroli var veikt ar zemu ātrumu demonstrēt šīs mehānisko,MAIŅSTRĀVAS frekvences pārveidotājs learningVFprinciple。
1)Motors:24PM35W0304
2)Barošanas spriegums:24V
3)jauda:35W(nominālā) ,60 W(Maksimālā vērtība)
4)ātrums:3000RPM
5)Zālē barošanas spriegums:5V
6)Polar logaritms:4
Vilnim atpakaļ EMF ir šādi:
60PM100W03: Trīs posmu pastāvīgo magnētu motors : Trīs posmu pastāvīgo magnētu motors,Aprīkots ar trīs-fāžu Zālē pozīcijas sensors,Tas motors ir pielāgota,Trīs posmu pastāvīgo magnētu motors ar sinusoīdu atpakaļ EMF; Vektoru givingFOCControl isPMSMcontrol; Pārslēgšanu sešu solis pulsePWMNamelyBLDCcontrol;Asinhrono communicationVFThe kontroli var veikt ar zemu ātrumu demonstrēt šīs mehānisko,MAIŅSTRĀVAS frekvences pārveidotājs learningVFprinciple。
1)Motors:60PM100W03
2)Barošanas spriegums:24V
3)jauda:100W(nominālā) ,200W(Maksimālā vērtība)
4)ātrums:3000RPM
5)Zālē barošanas spriegums:5V
6)Polar logaritms:4























{kind=link}
{kind=link}
{kind=link}